Towards Optimizing Convolutional Neural Networks for Robotic Surgery Skill Evaluation
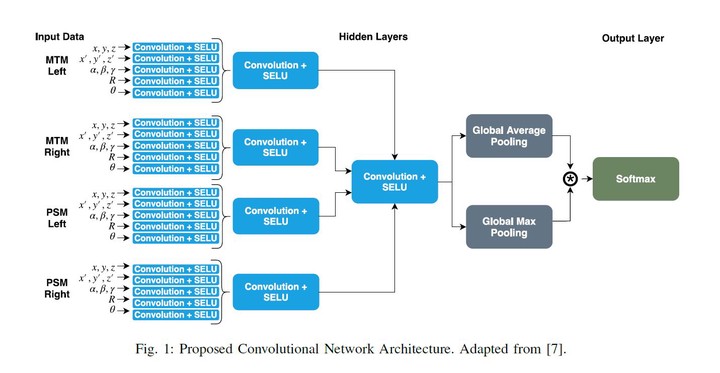 Photo by Authors
Photo by AuthorsIn medicine courses, improve the skills of surgery students is an essential part of the program. For training the surgeon residents the institutions normally using a standard checklist to evaluate the student evolution. However, the checklist evaluation is susceptible to evaluator bias, inter-evaluator variability, besides being time-consuming. The automation of this process is an important evolution in medical training. An alternative to the instructor checklist is capturing and evaluation of kinematic data regarding the surgical motion. We propose a novel CNN architecture for automated robot-assisted skill assessment. We explore the use of the SELU activation function and a global mixed pooling approach based on the average and max-pooling layers. Finally, we examine two types of convolutional layers: real-value and quaternion-valued. The results suggest that our model presents a higher average accuracy across the three surgical subtasks of the JIGSAWS dataset.